

Robotics: Blessing and Curse? Robots have improved healthcare , surveillance, delivery of goods (drones), spacecraft, travel, logistics, etc.

Is it time for 3D Printing to Adopt Blockchain Technology? Research has already shown 3D printing has a growing need for cybersecurity.
Why STEM Education in Australia The Australian industries to be benefited from STEM include advanced information and communication technology

Animation Studios Mechatron Robotics project uses an Arduino uno R3 a LCD and push buttons. It is based on the concept of arduino and LCD

Machine Learning for Disables can help those disabled people to improve their lives. With the marvel of machine learning doctors

What are the Consequences of Not Embracing Robotics & AI? We won’t be able to go ahead as these are the next big things.

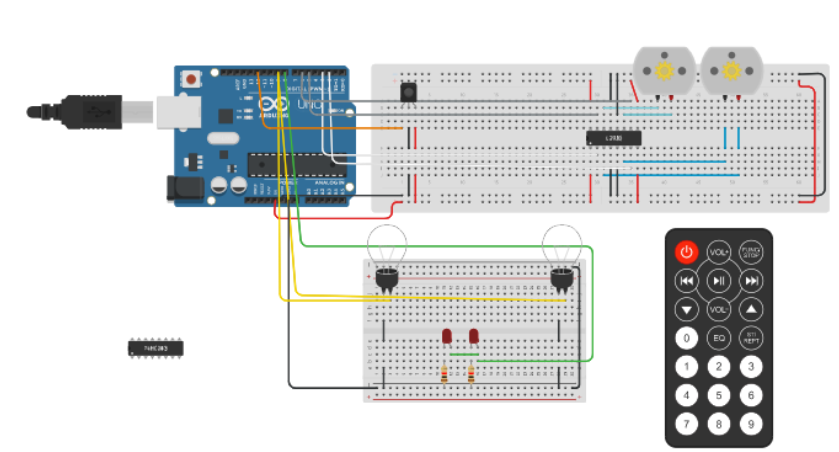
Home Automation System is made because today's light bulbs tend to heat and this can cause blast in the house.

Robotics and the Pandemic 2020. This is where Robotics can come in, robots can help reduce the human contact.
Key Elements Most of the Schools are Missing. Everyone has different criteria but one key element remains the same:” The quality of teaching

Why Learning App & Game Development is Important for Your Kid? Today, most of the kids are taking interest in the Apps and Games
Robotics: Blessing and Curse? Robots have improved healthcare , surveillance, delivery of goods (drones), spacecraft, travel, logistics, etc.
Is it time for 3D Printing to Adopt Blockchain Technology? Research has already shown 3D printing has a growing need for cybersecurity.
Why STEM Education in Australia The Australian industries to be benefited from STEM include advanced information and communication technology
Animation Studios Mechatron Robotics project uses an Arduino uno R3 a LCD and push buttons. It is based on the concept of arduino and LCD
Machine Learning for Disables can help those disabled people to improve their lives. With the marvel of machine learning doctors
What are the Consequences of Not Embracing Robotics & AI? We won’t be able to go ahead as these are the next big things.
Home Automation System is made because today's light bulbs tend to heat and this can cause blast in the house.
Robotics and the Pandemic 2020. This is where Robotics can come in, robots can help reduce the human contact.
Key Elements Most of the Schools are Missing. Everyone has different criteria but one key element remains the same:” The quality of teaching